자동화장비
Rom-Writing 자동화/ 반도체부품 테스터기 자동화
AMT-1200
-

Automatic Device Programming Handler
- AMT-1200 수동에 의존하였던 기존 AP Test작업을 개선하여 설비를 이용한 자동화를 실현함으로써 생산성의 최대화 및 불량률의 최소화를 목적으로 하여 제작함
-
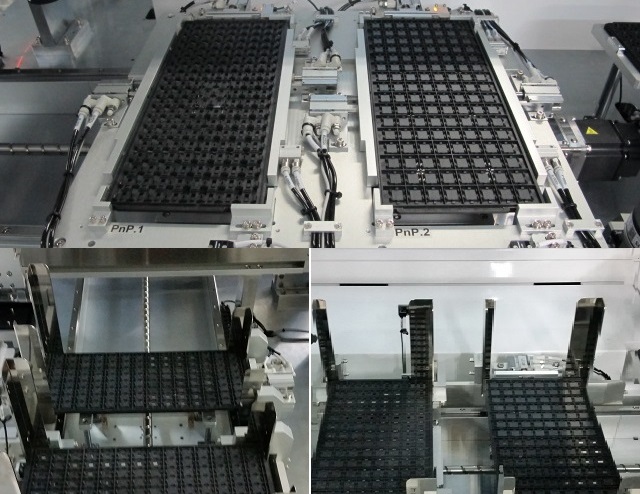
AutoTray System
▷ Device가 삽입된 Tray를 30매 적재할 수 있으며, Check Sensor를 설치하여 Auto로 Tray를 공급함
▷ 적재된 Tray는 Transfer를 통해 1매씩 PnP Tray(작업 Tray) 위치로 이송
▷ 작업이 완료된 Tray는 Unloader 위치로 이송하며, Unloader 부에는 적재 Sensor를 설치하여
최대30매까지 적재 가능함 -
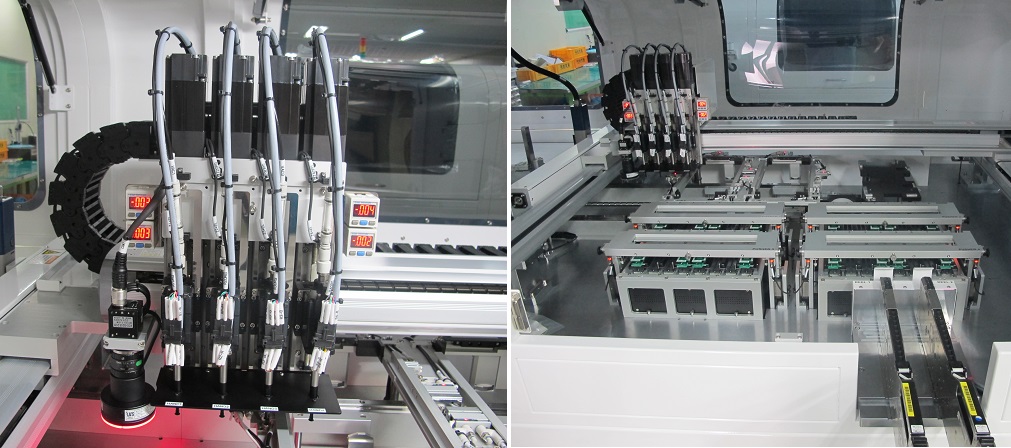
Z Robot SYSTEM (4 Pickers)
▷ Picker는 Device를 흡착하기 위한 Unit이며 Socket에 삽입ㆍ배출은 개별동작
▷ Servo Motor를 이용하여 Pick-Up 및 Rotation 동작을 하며 Vacuum 접촉면은 무정전
패드로 구성됨
▷ Vacuum Ejector를 이용한 흡착 방식으로 Device를 Pick-Up하고 Vision Camera로 흡착된
Device의 비틀림 정도를 확인하고 각도 보정함
▷ 끝 단 Nozzle은 교체형으로써 트러블에 의한 파손 시 교체가 용이함
-
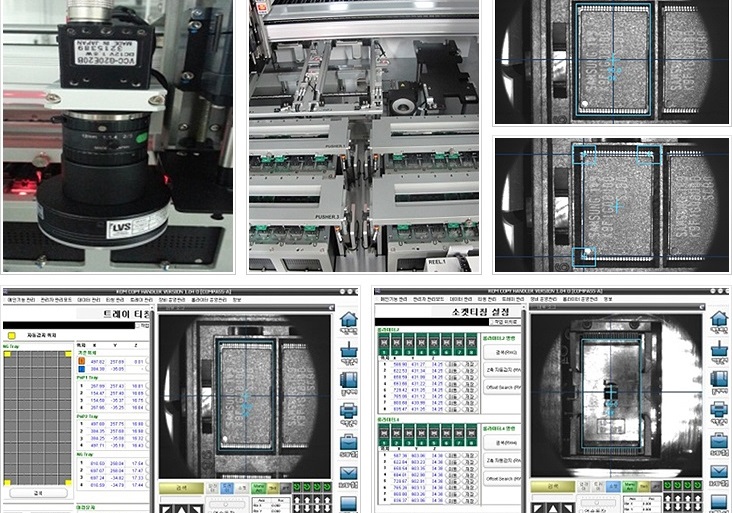
Vision System
▷ Socket과 Tray의 위치를 Setting하기 위한 상부 Vision Camera장착
▷ Pick-up한 Device의 비틀림 각을 보강하기 위한 하부 Vision Camera장착
-
Heating System
▷ AP의 열충격을 Test하기 위한 기구를 설치하여 제품생산시 Test항목을 추가하여 진행가능 함
▷ 이송시 열 손실을 최소화 하기 위하여 Heating구간이 3곳으로 배치됨
-
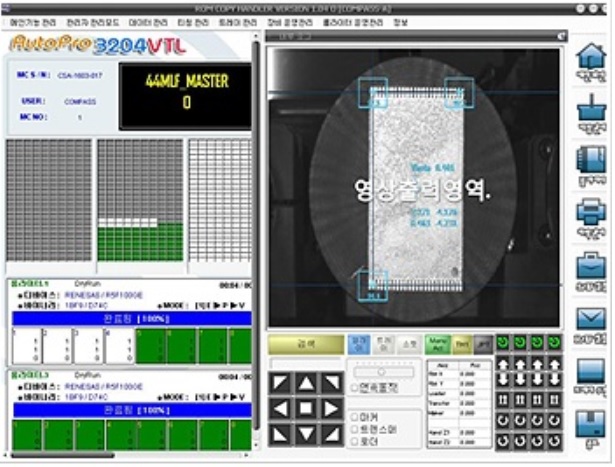
Graphical User Interface
▷ 미니 키보드와 터치 스크린을 적용하고
▷ Vision 처리영상과 생산결과 조회
▷ 에러/이벤트로그 조회, Socket 상태, Check SUM/CRC관리 등
▷ User가 사용하기 쉬운 환경의 Gui제공
-
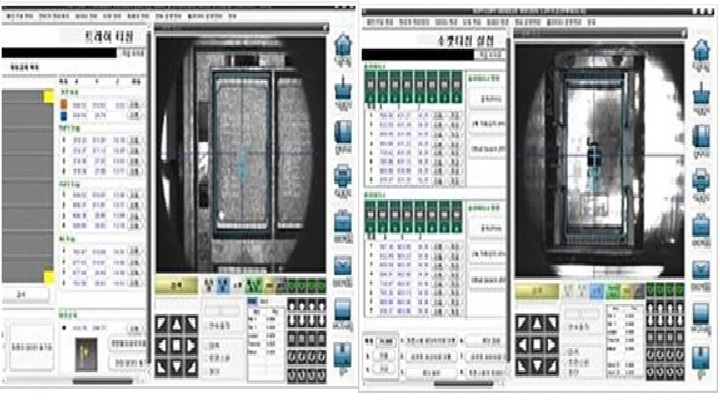
Tray / Adapter Teaching
▷ Tray에 삽입된 Device를 정확한 위치에서 Pick-Up 및 Place가능하도록 설정
▷ Tray에서 Pick-up한 Device를 Adapter에 투입 또는 Adapter에 투입된 Device Tray로 다시 옮기도록 하기 위한 설정
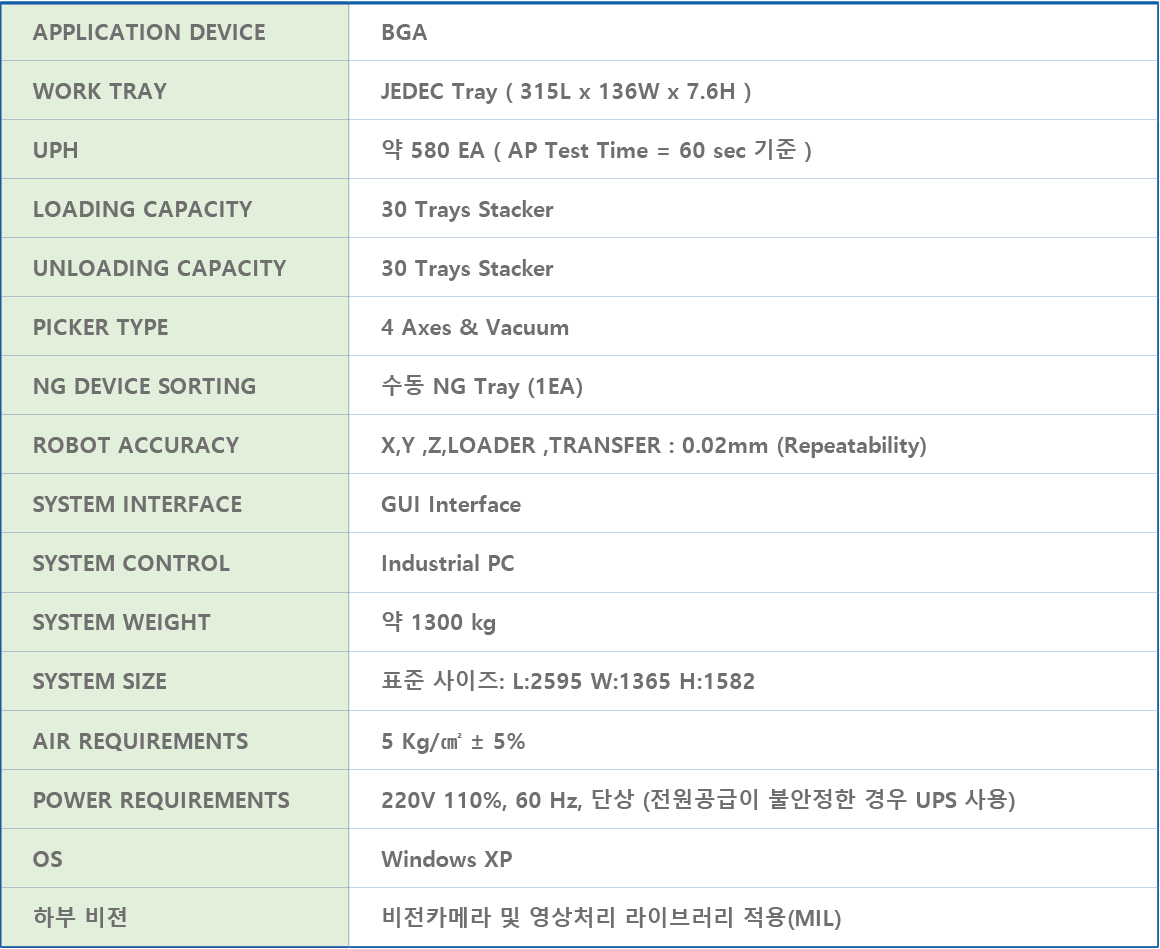
Specification
|
|